PWM หมายถึง Pulse Width Modulation เป็นเทคนิคที่ Arduino ใช้ในการควบคุมวงจร
และ เขียนค่าแบบอะนาล๊อก (Analog) ด้วยพอร์ตดิจิตัล (Digital)
และ เขียนค่าแบบอะนาล๊อก (Analog) ด้วยพอร์ตดิจิตัล (Digital)
คือ โดยปกติแล้ว พอร์ตดิจิตัล จะสามารถมีได้แค่ 2 สถานะ คือ HIGH (5 โวล์ท) กับ LOW (0 โวล์ท)
เท่านั้น จึงทำให้สร้างค่าสัญญาณลอจิคได้เพียง เปิดหรือปิด (1 หรือ 0 , มีไฟหรือไม่มีไฟ) แค่นั้น
ซึ่งการใช้เทคนิค PWM นั้น จะเป็นการทำให้พอร์ตดิจิตัล สามารถเขียนค่าได้มากกว่า HIGH หรือ LOW
โดย ทำให้สามารถเขียนค่าเป็นแบบอะนาล๊อกได้ (อาจเป็น 0-255 หรือ 0-1023) โดยวิธีการนั้น
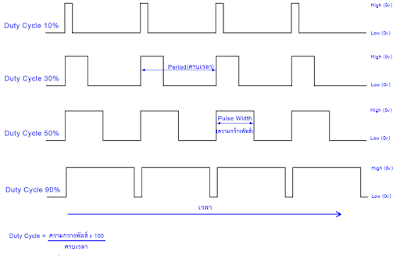
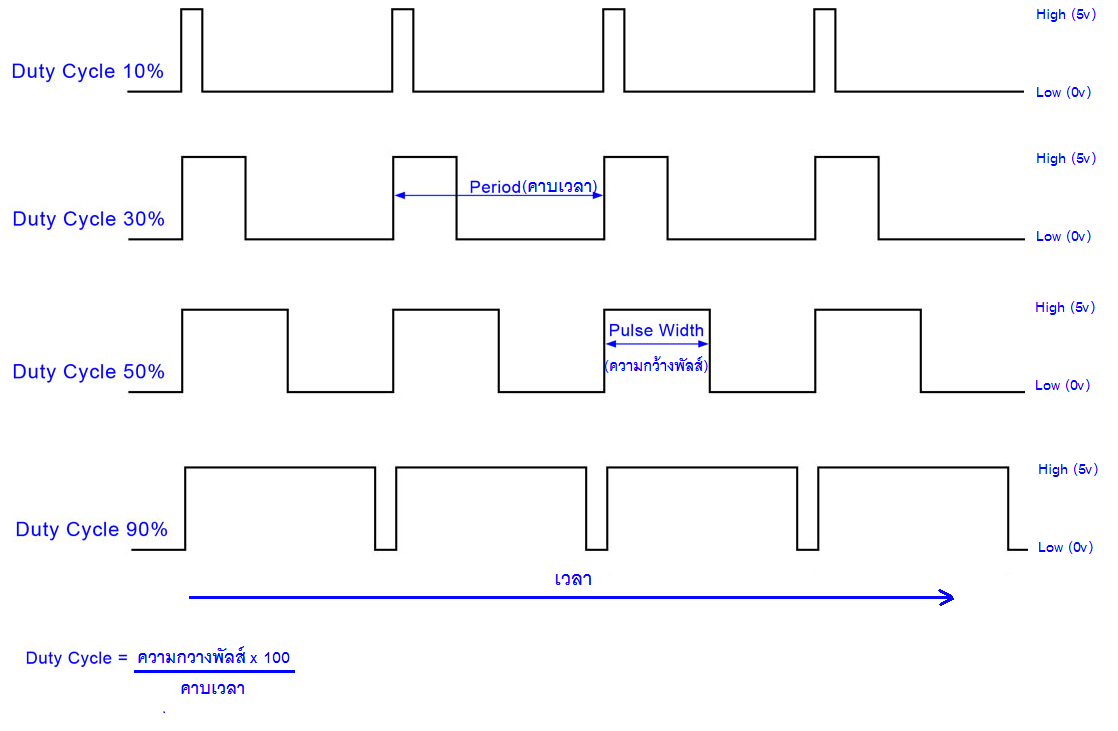
จะใช้การปรับสถานะของสัญญาณลอจิค HIGH / LOW สลับกันไปมาด้วยคาบเวลาหนึ่งๆ
โดยค่าที่ได้นั้นจะขึ้นอยู่กับ สัดส่วนเวลาของสัญญาณในช่วงเวลาที่มีสถานะเป็น HIGH
กับช่วงเวลาที่เป็น LOW โดย ช่วงเวลาทั้งหมดที่สัญญาณมีสถานะเป็น HIGH นั้นเราจะเรียกว่าเป็น
กับช่วงเวลาที่เป็น LOW โดย ช่วงเวลาทั้งหมดที่สัญญาณมีสถานะเป็น HIGH นั้นเราจะเรียกว่าเป็น
“ความกว้าง Pulse (Pulse Width)”
โดยสัญญาณพัลส์ เมื่อเทียบ % ของช่วงเวลาที่เป็น HIGH (หรือก็คือ % ของ Pulse Width)
กับ % ของคาบเวลา (Period) ของพัลส์ลูกนั้นๆ เราจะเรียกว่า Duty Cycle ครับ
เพื่อความเข้าใจสามารถดูได้จากตัวอย่างด้านล่างครับ
กับ % ของคาบเวลา (Period) ของพัลส์ลูกนั้นๆ เราจะเรียกว่า Duty Cycle ครับ
เพื่อความเข้าใจสามารถดูได้จากตัวอย่างด้านล่างครับ
(คลิ๊กที่รูปภาพเพื่อดูภาพขนาดเต็ม)